Un nuevo sistema quirúrgico, Flex System de Medrobotics, tipo Serpiente robótica, es autorizado en Europa y tiene la capacidad de llegar a lugares que antes solo podían llegarse por medio del bisturí.
El robot originalmente se conoce como el sistema Flex System y es un androide mecánico que tiene las funciones móviles como una serpiente y donde se introduciría por la garganta evitando así ciertas incisiones en el cuerpo y por medio de una palanca de mando se conducirían a ciertos órganos y las partes menos accesibles.
Este dispositivo se había utilizado primeramente en la exploración de la central nuclear abandonada de Zwentendorf, en Austria pero ahora su tecnología se utilizará para procedimientos médicos.
La endoscopia quirúrgica ha sido aclamada como la ruta a fin de abrir procedimientos quirúrgicos, pero muchas operaciones relativamente sencillas todavía tienen que hacerse con un bisturí.
Ahora el sistema Flex de Medrobotics (Raynham, Massachusetts), es el primer dispositivo de endoscopia quirúrgica con capacidades de serpiente que le permiten llegar a lugares que los instrumentos rectos simplemente no pueden.
La tecnología detrás de la Flex fue desplegada originalmente en la Carnegie Mellon Robotics Lab y desarrollada posteriormente por Farm, una empresa de avances de productos de dispositivos médicos.
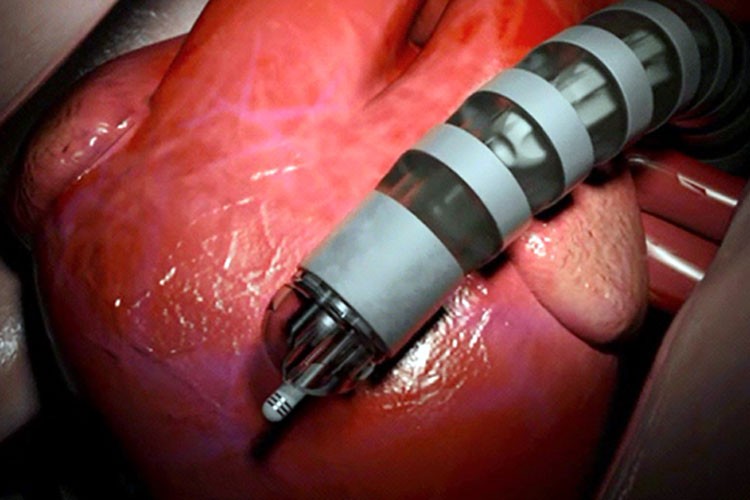
Se trata de componentes concéntricos flexibles que se pueden hacer ser rígidos o ir doblando cuando sea necesario, así como actúa una serpiente que se puede colocar alrededor de los obstáculos. La punta de la serpiente puede aceptar una variedad de instrumentos a través de los múltiples canales dentro del endoscopio, y también alberga una cámara de visión de video de alta definición.
El sistema acaba de recibir la marca CE de aprobación y está siendo puesta a disposición de los cirujanos europeos.
Desde la página del producto:
El sistema permite a los médicos operar a través de caminos tortuosos no lineales, es auto portante, a través de un acceso de un solo sitio en el cuerpo.
La maniobrabilidad del endoscopio se obtiene de sus numerosas conexiones mecánicas con mecanismos concéntricos. Cada mecanismo se puede colocar en un estado rígido o un estado flácido. Mediante el empleo de un «seguir al líder» es la estrategia de movimiento patentado con estos estados alternados, el endoscopio se puede dirigir en cualquier forma a través de las orientaciones relativas de sus vínculos.
Por el momento se realizarán operaciones primordialmente en la endolaringe y orofaringe y en el futuro se espera que también pueda utilizarse para operaciones más complejas como los procedimientos en el corazón.
Este dispositivo está basado en el diseño de una investigación de Howie Choset, que es profesor de Robótica de la Universidad Carnegie Mellon, Pensilvania.
El equipo, que es asistido por un robot, lo está desarrollando la empresa Medrobotics Corp., que tiene sede en Nueva Inglaterra, al noreste de EE.UU.
Actualmente Medrobotics está en un proceso de comercialización del dispositivo a toda Europa, donde pronto se incorporará a los hospitales.
Aquí vemos un sistema robótico de serpiente no endoscopio desarrollado por científicos rusos que supone el mismo principio de movilidad:
¿Qué te parece?